
Construiremos un robot que huye de la oscuridad. Es decir, emularemos el comportamiento de algunos insectos que escapan cuando detectan una presencia que les obstruye la luz del sol, como señal de que un depredador se acerca.
¿Qué sensor utilizamos?
Ojo: detecta la luz ambiente.
¿Qué actuadores utilizamos?
Motores: son las que dan movimiento a las ruedas del robot.
Construimos el programa para el robot con Qublock
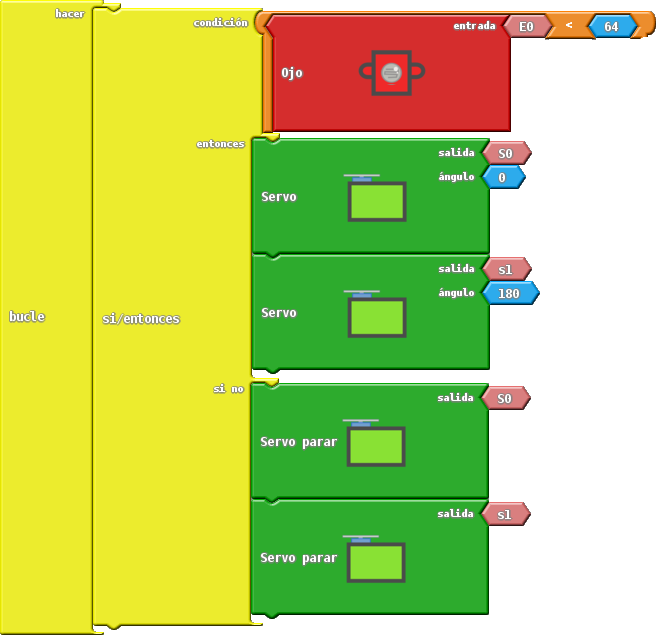
En el video podemos ver cómo huye el robot cuando la mano le tapa la luz.
Podemos también lograr el comportamiento inverso, es decir que el robot siga la oscuridad, solamente cambiando de posición los motores de la ruedas, invertimos las salidas que usamos en el caso anterior.
En el video podemos ver el resultado: