este juego se puede jugar en la nueva versión de qudino con salida de video
Basado en starfield

nuevo sitio: https://maquinaslibres.tk
este juego se puede jugar en la nueva versión de qudino con salida de video
Basado en starfield
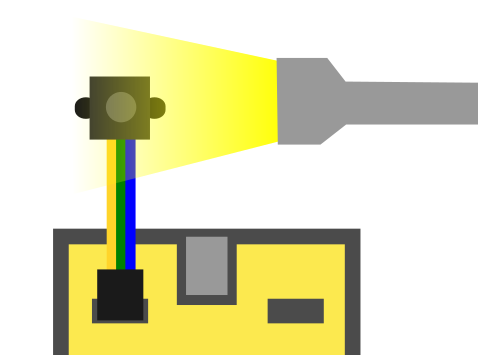
Aspecto del Módulo Qudino y sus conectores
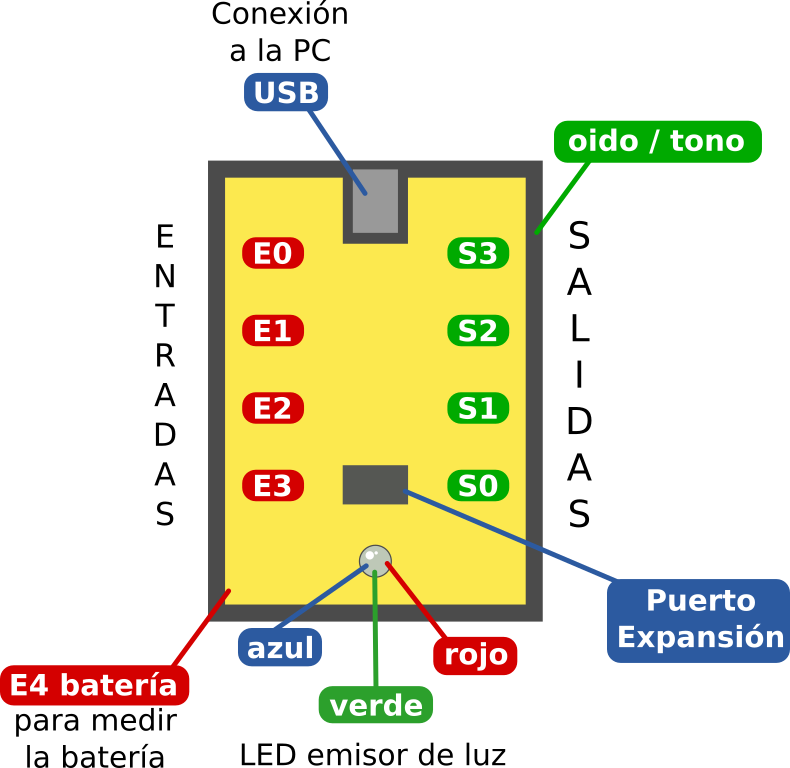
El Módulo Qudino es el cerebro que interpreta al mundo por medio de sus sensores y acciona mediante sus actuadores.
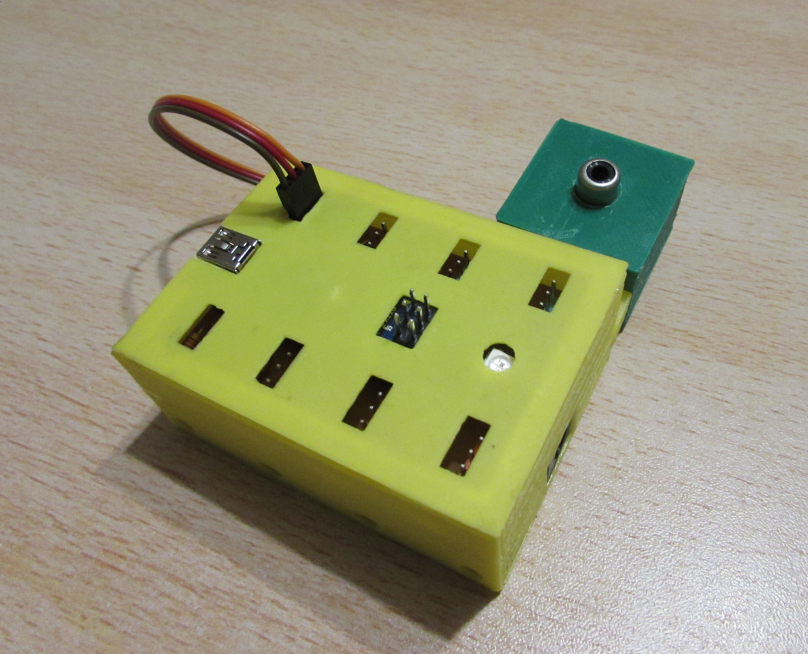
El Módulo Qudino tiene incorporado un sensor oído y dos actuadores tono y led RGB. Un Neopixel para los modelos NEO.
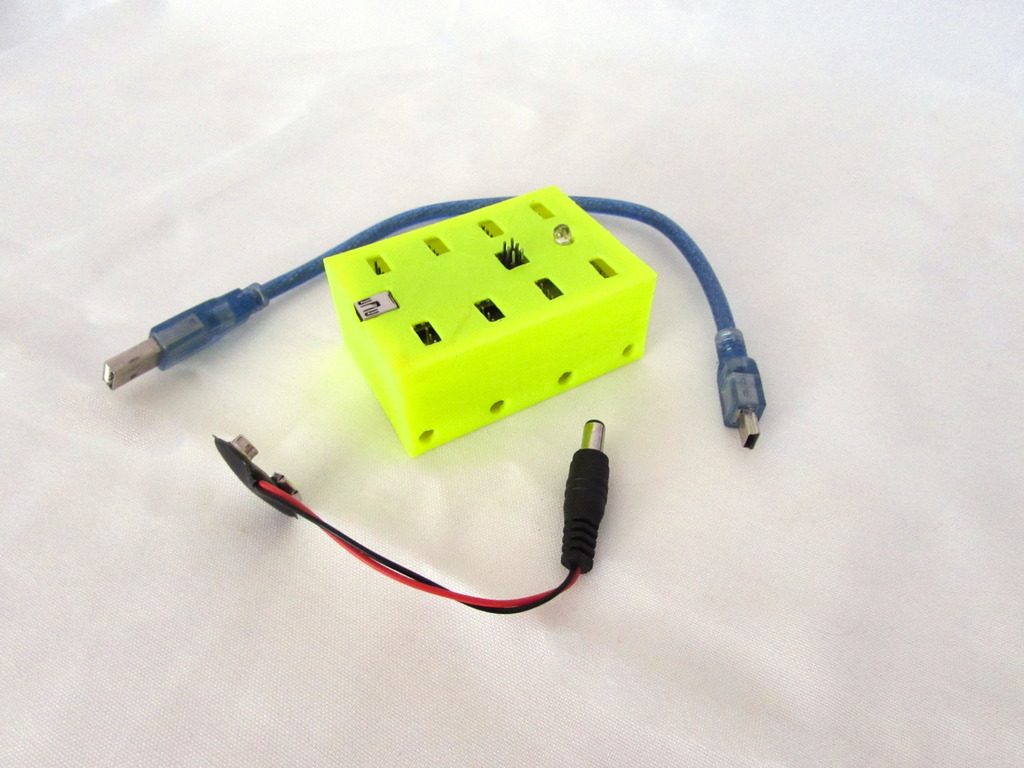
Además el El Módulo Qudino viene acompañado de un cable USB, para programarlo y un conector para batería externa.
Probando salida de video con el juegos space invaders.
Música del juego Alter Ego
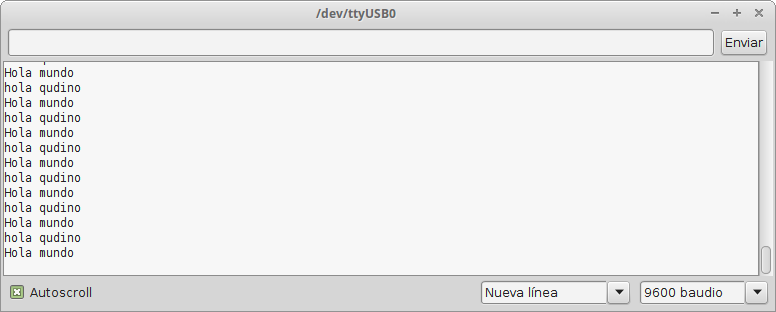
La comunicación permite a Qudino interactuar con la computadora a través del monitor serial.

En el siguiente ejemplo se ve una «conversación » entre el Qudino y la computadora.
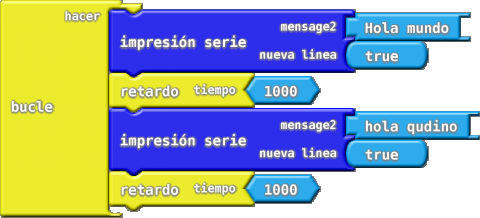
En la computadora en el monitor puerto serie se ve lo siguiente:
¿Qué es un zumbador?
El zumbador o buzzer, es un componente capaz de producir sonidos a diferentes frecuencias. Son utilizados en multitud de sistemas para producir señales o avisos, como en despertadores, timbres, temporizadores de electrodomésticos (como el de un horno), etc.

Vamos a descubrir cómo funciona el zumbador. En la pestaña Componentes seleccionamos el bloque Sonar el zumbador. Lo colocamos en el Bucle principal (Hacer) y seleccionamos la nota y la duración que queremos que tenga el sonido. Para el ejemplo, hemos seleccionado las notas La = 440
Ver las frecuencia de las notas de una piano
Te habrás dado cuenta de que el zumbador suena continuamente. Recuerda que el Bucle principal (Hacer) ejecuta el programa de forma indefinida.


Pronto te darás cuenta que añadir sonido a tus creaciones te será muy útil y además… ¡es uno de los componentes más divertidos! A partir de ahora vamos a poder diseñar proyectos mucho más creativos, sorprendentes y… ¡ruidosos!
Los LED son diodos semiconductores que permiten que la corriente circule únicamente en una dirección y emiten luz cuando se activan. Uno de los usos más comunes de los LED es el de indicadores en dispositivos electrónicos, sustituyendo a las pequeñas bombillas que se usaban con anterioridad. Además, dada su capacidad para operar a altas frecuencias, se usan también en tecnologías avanzadas y de control.
El desarrollo más reciente de los LED ha permitido que se puedan utilizar en el ámbito de la iluminación ambiental. Aunque actualmente su uso en este campo es limitado, se prevé un aumento de su presencia en los próximos años, pues tienen numerosas ventajas frente a las lámparas incandescentes y fluorescentes.
Algunas de ellas son las siguientes:
¿Quieres aprender a programar un LED usando qublock?
Te enseñamos mediante ejemplos, vas a necesitar:
Vamos a poner varios ejemplos para que aprendas a programar la Luz.
Encender una Luz roja
Es uno de los ejemplos de programación más sencillos. Necesitas conectar el Qudino a la computadora, con el cable USB. Usamos el led Rgb del Qudino.
El Luz, actúa componente digital, ya que admite solo dos estados: apagado y encendido. Todos los componentes, ya sean sensores o actuadores que tengan solo dos estados, serán digitales, otro ejemplo es el botón (pulsador), que puede estar pulsado o no pulsado.
Seguimos los siguientes pasos para resolver el problema.
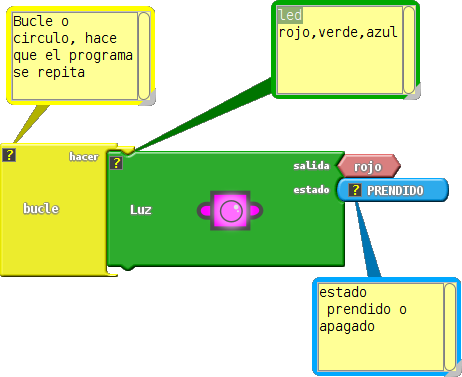
Ahora, programamos con qublock, nuestro qudino para que encienda el LUZ. Para ello, seleccionamos el bloque Luz, le asignamos el rojo y establecemos la acción que deseamos desempeñar: en este caso, tras programar el qudino, si todo ha ido bien, la LUZ conectado en el rojo debería estar encendido.
Si no se enciende, averigua qué puede haber ocurrido haciéndote las siguientes preguntas: “¿He conectado la placa al ordenador?” “¿He seleccionado correctamente el puerto al que se ha conectado la placa?”“¿Me he acordado de ENCENDER la luz en el bloque?
Apagar un LED
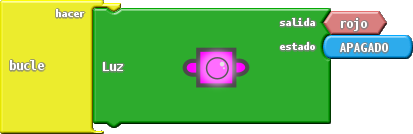
A continuación, vamos a programar nuestra placa controladora para que haga lo contrario, es decir, para que apague la Luz. No olvides programar de nuevo la placa al hacer los cambios.
Vamos a complicarlo un poco, ¿qué tal si ahora hacemos parpadear un LED? En esta ocasión podemos dejar que tú lo intentes por ti mismo. Debes hacer un programa que haga parpadear un LED (encender 1 segundo, apagar 1 segundo). Inténtalo en qublock y luego sigue leyendo más abajo para ver la solución.
Es muy probable que hayas hecho algo así:

Esta solución no funciona porque el programa enciende el LED (durante un instante de tiempo que se corresponde con la velocidad del microprocesador de la tarjeta controladora) e inmediatamente lo apaga durante otro instante. Y, así, una y otra vez. El efecto de este programa es que parece que el LED está siempre encendido (con un brillo ligeramente más tenue al habitual).
El modo de hacer que funcione correctamente es introducir pausas, es decir, cuando, explicamos que el LED debe parpadear entendemos: ENCENDER – APAGAR – ENCENDER – APAGAR – etc.
Esto es incorrecto, en realidad habría que decir: ENCENDER – ESPERAR 1 SEGUNDO – APAGAR – ESPERAR 1 SEGUNDO. – ENCENDER – etc.
Para ello deberás utilizar el bloque retardo o esperar
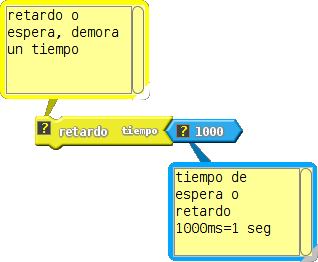
bloque retardo
Este bloque hace que el programa espere un tiempo determinado. Para indicar el tiempo, puedes usar un bloque de tipo número o una variable. Puedes encontrar el bloque número en la pestaña Matemáticas.
El programa correcto quedaría entonces del siguiente modo:
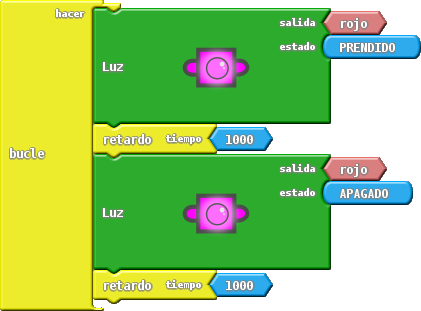
Si hemos programado la placa correctamente, nuestro LED debería encenderse durante un segundo, apagarse durante un segundo, encenderse de nuevo durante un segundo… Y así hasta el infinito, pues el programa se ejecutará en bucle. ¿Por qué durante un segundo? Porque es el tiempo de espera que hemos fijado para cada estado, pero ese tiempo se puede modificar según nuestras necesidades. Prueba a cambiar la frecuencia de parpadeo.
Bien, ya sabes lo básico de la programación de un LED. En otra entrada te enseñaremos a programar varios LED a la vez, pero si quieres puedes ir probando tú mismo.
Ejercicios
También puedes conectar un led externo. Usando la Salidas S0, S1, S2, S3.
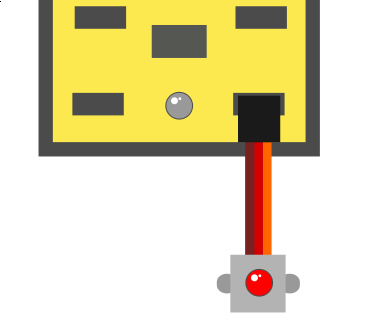
Al conectar cualquier componente es muy importante que te asegures de que los colores de los cables, queden así, el cable marrón para el lado de adentro del qudino, el rojo en el medio y el naranja para afuera.
El ojo es un sensor analógico, compuestos por una LDR, resistencia dependiente de la luz. Es similar al potenciómetro pero depende de le luz que incide en él.
¿Qué es un zumbador?
El zumbador o buzzer, es un componente capaz de producir sonidos a diferentes frecuencias. Son utilizados en multitud de sistemas para producir señales o avisos, como en despertadores, timbres, temporizadores de electrodomésticos (como el de un horno), etc.
qudino tiene incorporado un zumbador
Poniendo en marcha el zumbador
Vamos a descubrir cómo funciona el zumbador.En la pestaña Componentes seleccionamos el bloque Sonar el zumbador. Lo colocamos en el Bucle principal (Loop) y seleccionamos la nota y la duración que queremos que tenga el sonido. Para el ejemplo, hemos seleccionado las notas La,= 440
Te habrás dado cuenta de que el zumbador suena continuamente. Recuerda que el Bucle principal (Loop) ejecuta el programa de forma indefinida,Vamos a controlar que el zumbador suene cuando nosotros queramos utilizando un pulsador.
Una vez conectados los componentes, vamos a la pestaña Control y seleccionamos el bloque Si… ejecutar para programar que el zumbador suene únicamente si el botón está pulsado.
Además, fíjate que en este segundo ejemplo hemos utilizado un bloque diferente para hacer sonar el zumbador. Este bloque se encuentra en la pestaña Componentes, en el apartado Avanzados, y te permite introducir un valor de frecuencia en lugar de una nota para componer melodías más elaboradas.
Melodia-zumbador
La primera parte de este bloque Avanzado, se puede programar de varias formas. Podemos indicarle el número de pin en el que está conectado nuestro zumbador, o bien utilizar el bloque Componentes -> Avanzado -> Variable componentes y elegir el nombre del zumbador.
OpcionesZumbador-01
No esperes más y prueba a programar tus melodías favoritas. En este post encontrarás varias partituras para empezar e, incluso, un traductor de notas a frecuencias. ¡Dale caña!
Aún hay más
A continuación te proponemos algunas ideas para seguir practicando:
Mejora tus luces navideñas, añadiendo ahora una melodía navideña acorde con el ritmo de parpadeo.
Construye tu propio telégrafo, utilizando un LED, un pulsador y el zumbador.
Pronto te darás cuenta que añadir sonido a tus creaciones te será muy útil y además… ¡es uno de los componentes más divertidos! A partir de ahora vamos a poder diseñar proyectos mucho más creativos, sorprendentes y… ¡ruidosos!