
En el tutorial vamos a ver como interactuarán LEDs , Servo y un Botón
Nuestros componentes a usar serán:
– 1 LED Rojo
– 1 LED Verde
– 1 LED Amarillo
– 1 Servo
– 1 Qudino
– 1 Botón
– Cable USB
Se puede hacer con un Kit Qubótica Básico
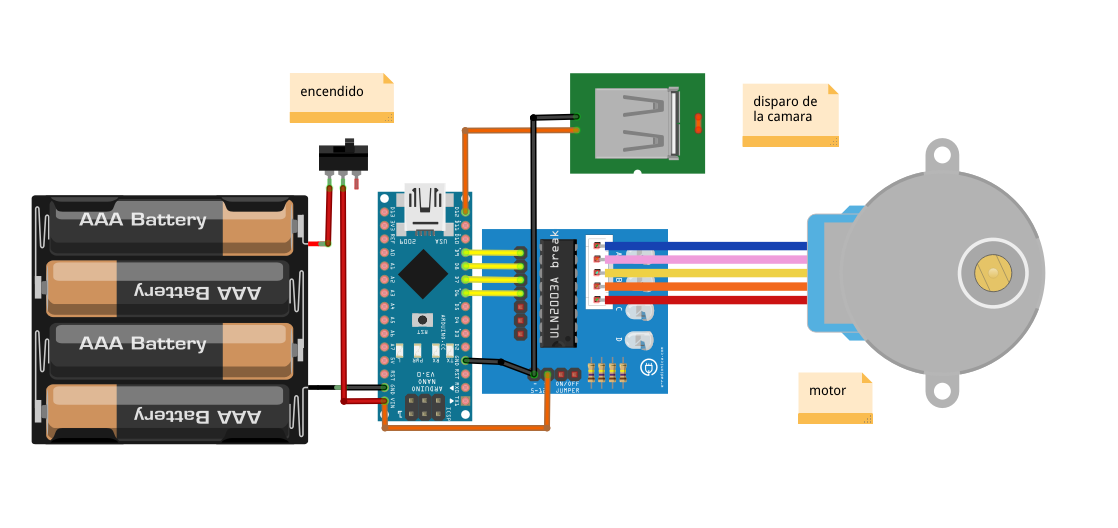
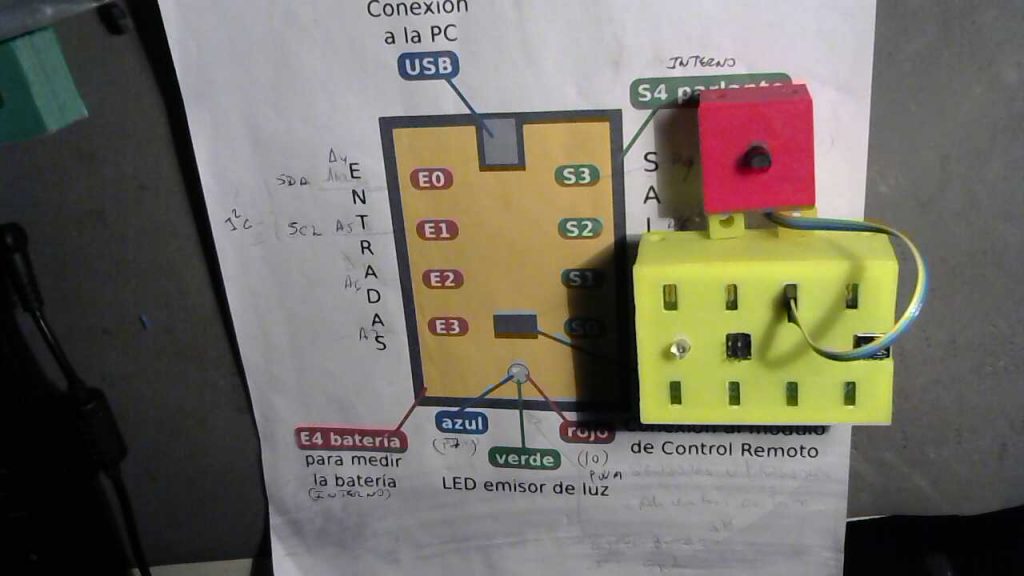
A continuación mostramos el esquema eléctrico con las respectivas conexiones:
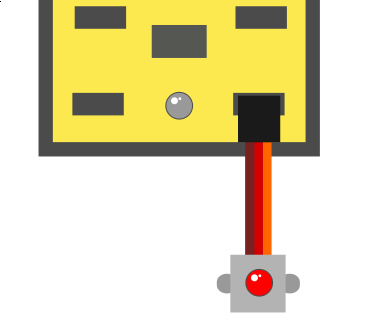 En la parte frontal el semáforo lo hacemos led y con Qubic montados en los agujeros laterales del Qudino
En la parte frontal el semáforo lo hacemos led y con Qubic montados en los agujeros laterales del Qudino ,igualmente se hace el montaje del servo.
,igualmente se hace el montaje del servo.
El Botón se monta de igual manera del lado de atrás del Qudino
En ambos casos observa los colores,que te indican la conexión
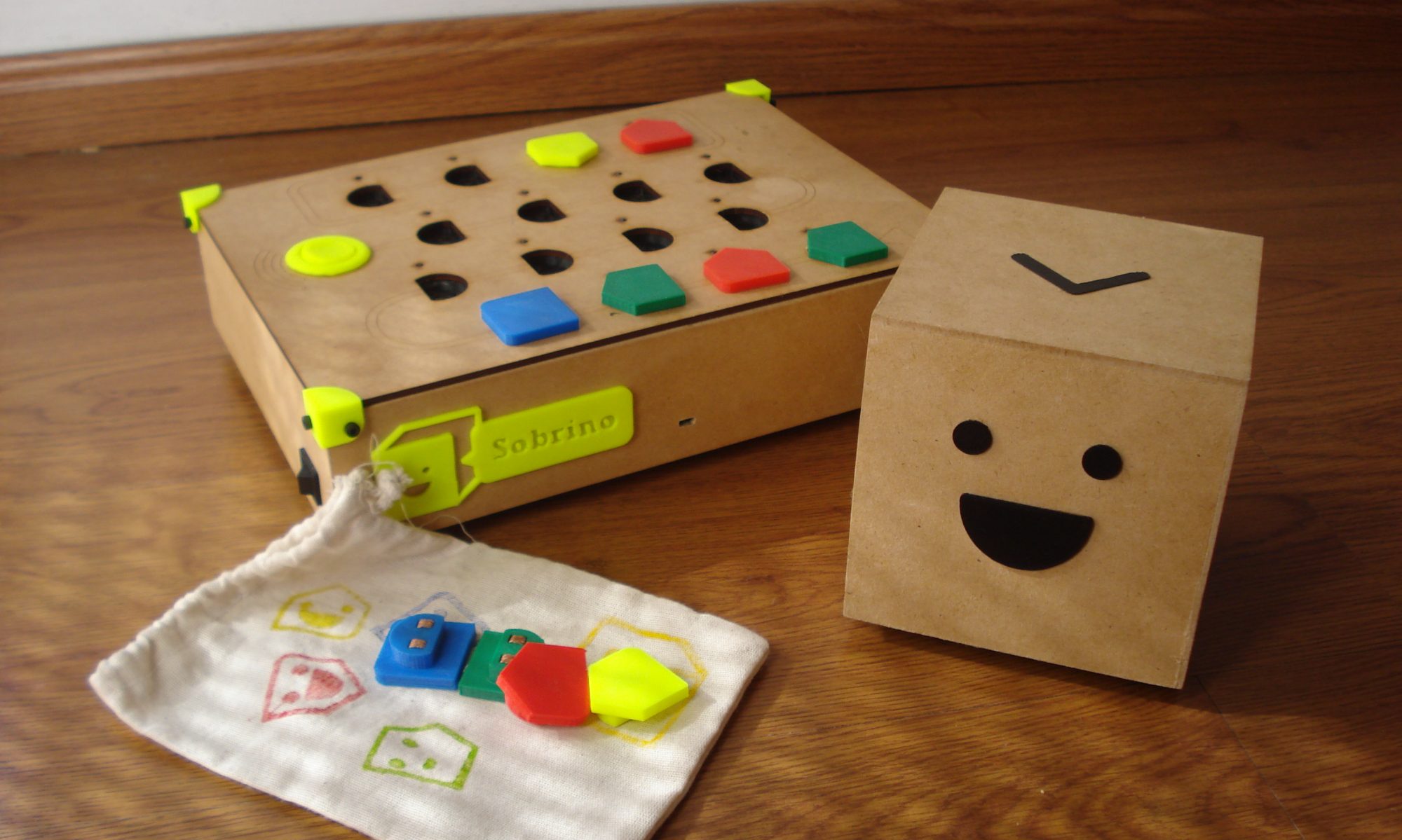
Procederemos seguidamente al montaje de la barrera. Para ello hemos utilizado una pieza plástica pero también se puede hacer en cartón u otro material.
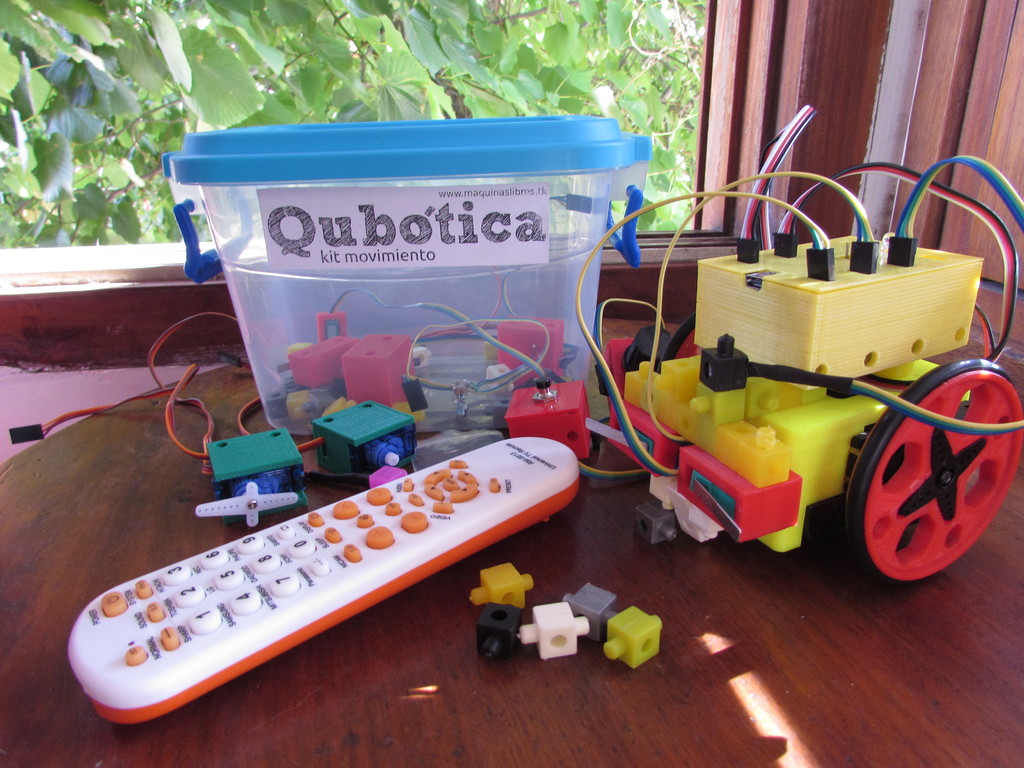
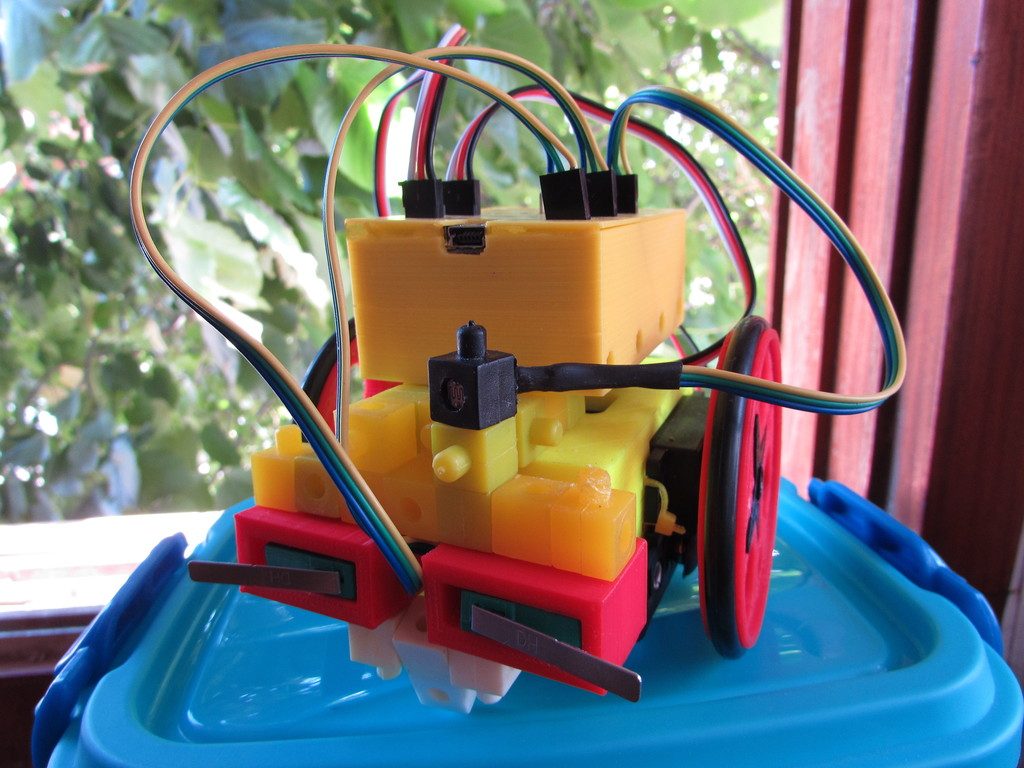
Si ademas se tiene un Kit Qubótica de Movimiento,se puede realiza un vehiculo robot que interactue con la barrera
Nuestros componentes a usar serán:
– 2 Servos con ruedas
– 1 Chasis
– 1 Qudino
– 1 Sensor infrarrojo
– Cable USB