La Biblia del Qudino : Vehículos de Braitenberg con Qubotica

nuevo sitio: https://maquinaslibres.tk
Para generar el movimiento de las ruedas debemos conectar cada «rueda» a una salida por S0 y S1
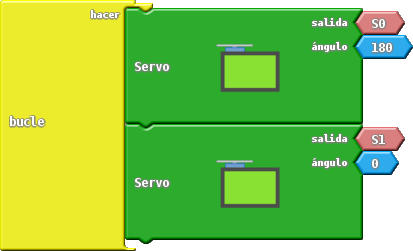
Si queremos generar un movimiento hacia la izquierda o hacia la derecha vamos a tener que poner los dos motores en 180° o los dos en 0°.
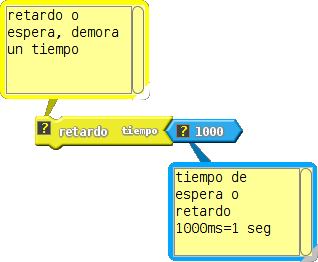
Agregando un retardo podemos hacer que un movimiento se hagan por un tiempo y luego agregar otro movimiento, otra retardo y otro movimiento…
En este ejemplo lo vemos moverse hacia adelante y luego hacia la derecha así sucesivas veces…
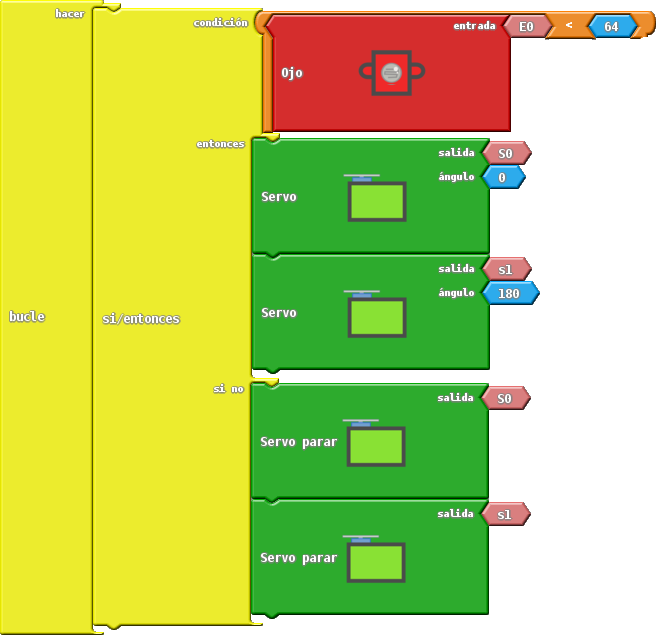
Construiremos un robot que huye de la oscuridad. Es decir, emularemos el comportamiento de algunos insectos que escapan cuando detectan una presencia que les obstruye la luz del sol, como señal de que un depredador se acerca.
¿Qué sensor utilizamos?
Ojo: detecta la luz ambiente.
¿Qué actuadores utilizamos?
Motores: son las que dan movimiento a las ruedas del robot.
Construimos el programa para el robot con Qublock
En el video podemos ver cómo huye el robot cuando la mano le tapa la luz.
Podemos también lograr el comportamiento inverso, es decir que el robot siga la oscuridad, solamente cambiando de posición los motores de la ruedas, invertimos las salidas que usamos en el caso anterior.
En el video podemos ver el resultado: