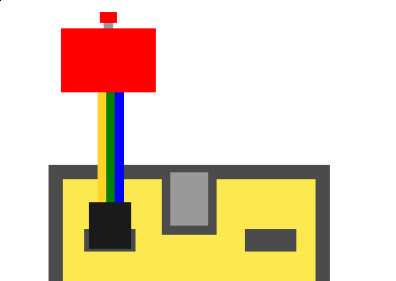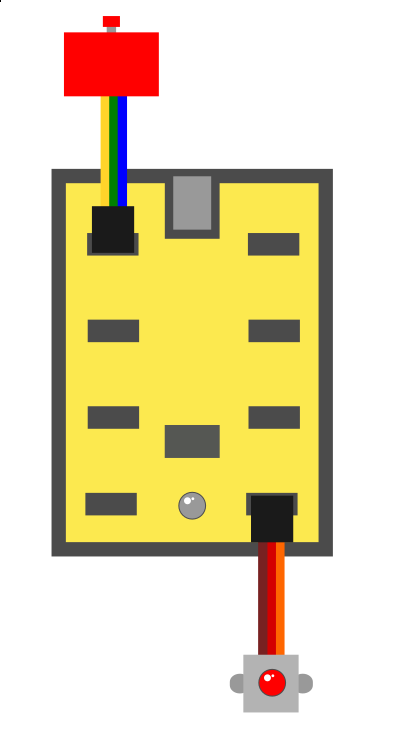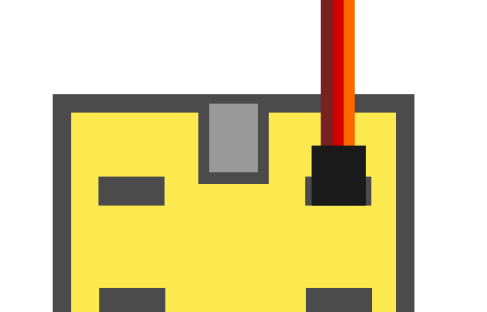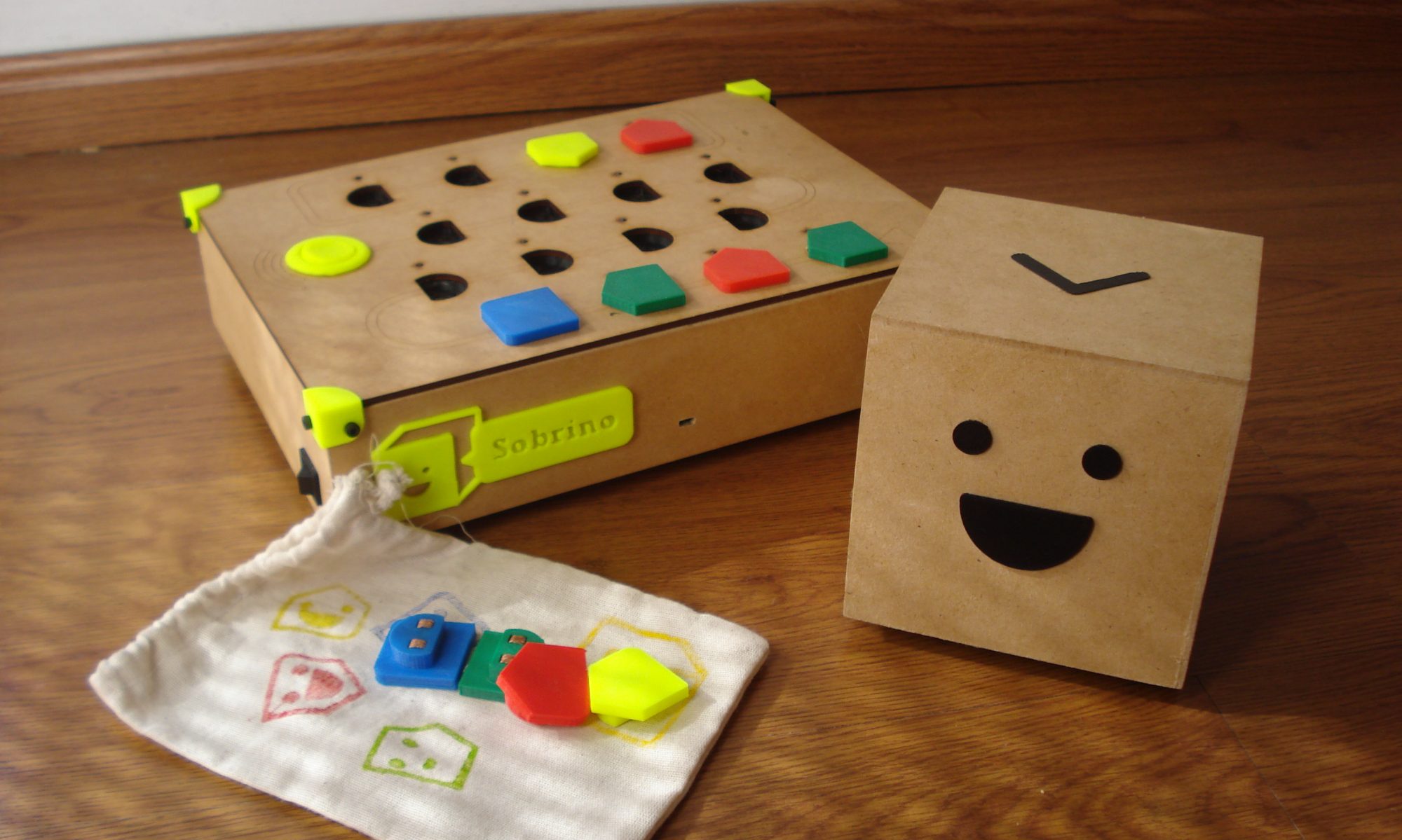

Los vehículos de Braitenberg son pequeños robots que pueden exhibir comportamientos complejos con un armado muy simple. Los vehículos típicamente tienen cuerpos en forma de caja con una rueda a cada lado. En la parte delantera del vehículo tiene sensores que detectan diferentes tipos de estímulos (por ejemplo, luz) del entorno. Estos sensores están conectados directamente a las ruedas del vehículo de manera que las ruedas giran cuando el sensor se activa.
El concepto es sencillo, pero Braitenberg demostró que estos vehículos pueden exhibir comportamientos aparentemente complejos e interesantes como “amor” o “odio”.
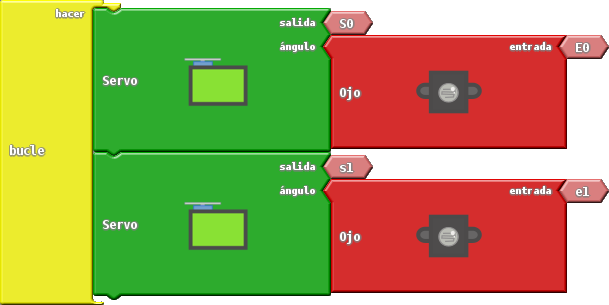
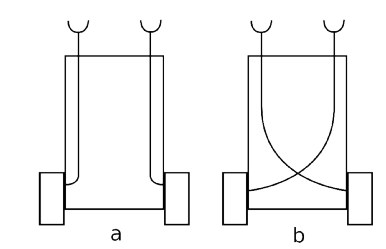
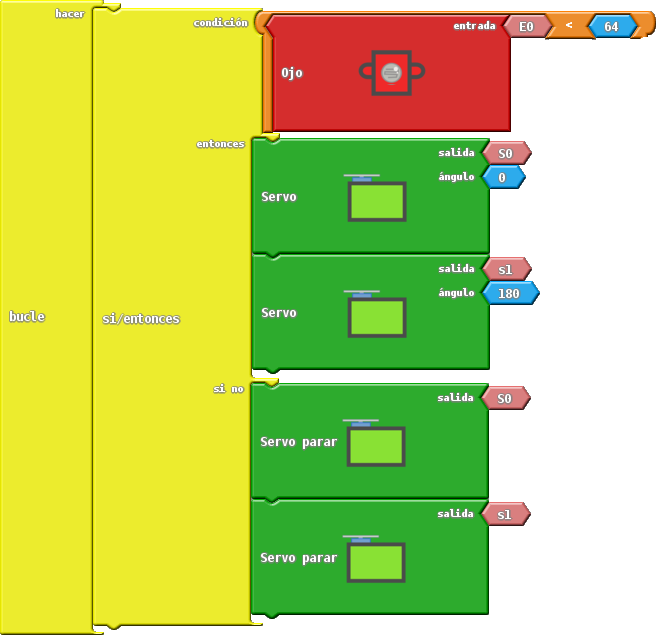
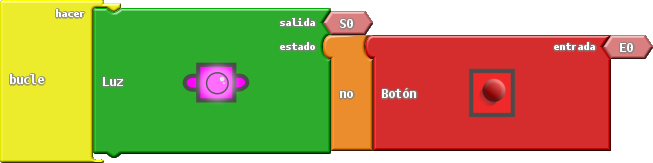
Modelos básico de vehículos de Braitenberg en el ejemplo esta implementado el «a»
Ejercicios
- Hacer el modelo «b»
- Usar el sensor de choque en lugar de los ojos
- Unir ambos sensores de modo que el robot huya de las paredes y de la luz