gráfico de 8 bit para memoria de nintendo creado a partir de caracteres (chr) y un mapeo de los caracteres (nam)
Las imágenes son del corto 4232
Descargar el programa img2nam

nuevo sitio: https://maquinaslibres.tk
La palabra robot proviene del checo: robota, que significa trabajo duro o forzado. Se usó por primera vez durante la obra de teatro Rossum Universal Robots de Karel Čapek y su uso se extendió gracias a las obras de ciencia ficción creadas por el escritor Isaac Asimov , en cuyos libros aparece por primera vez el termino robótica, como la ciencia de construir robots.
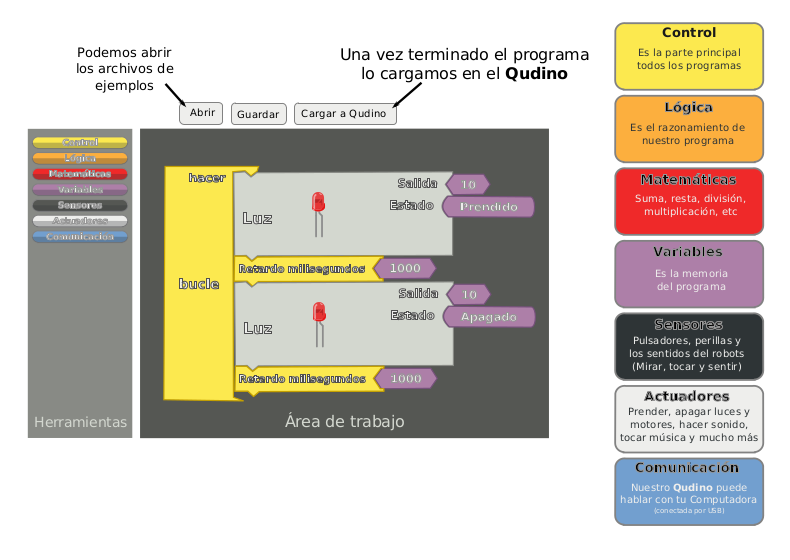
A menudo nos imaginamos a un robot como una máquina con forma humana que camina, habla, gesticula… pero en realidad es algo mucho más sencillo:
“Un robot es una máquina automática programable que es capaz de interpretar información del medio físico para modificar su conducta. Tiene la capacidad de interactuar con el entorno y, en función de ello, realizar unas funciones u otras.
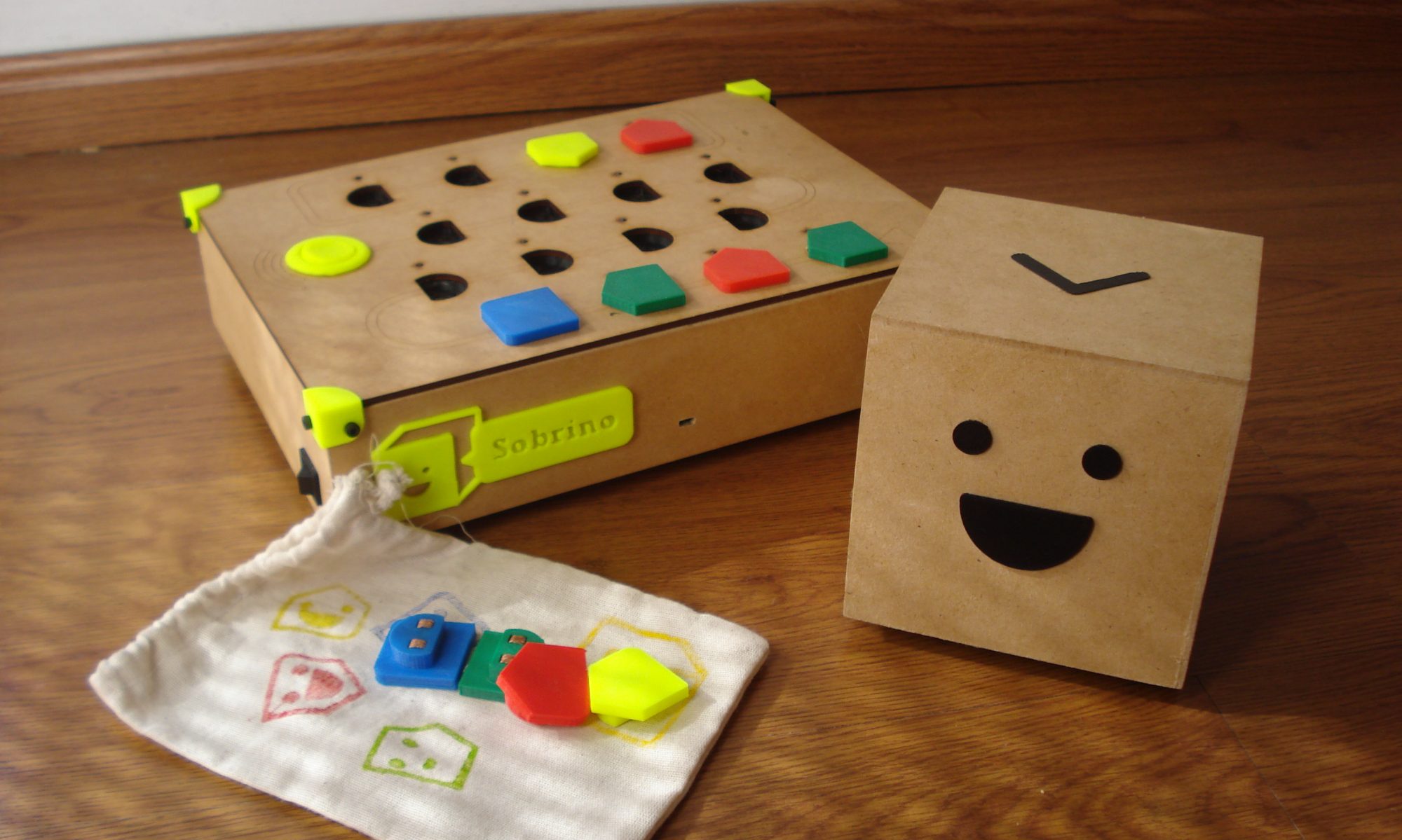
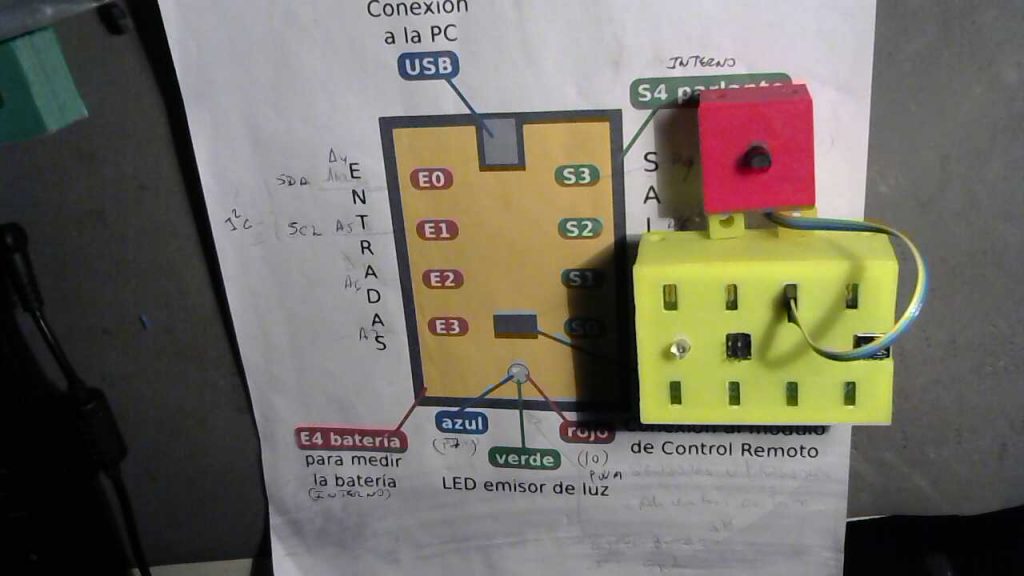
| Qudino es el cerebro que interpreta al mundo por medio de sus sensores y acciona mediante sus actuadores.
Sensores: estos son los sentidos de nuestro robot con los que podrá ver, oir y tocar. Actuadores: son las acciones, que puede realizar nuestro robot; moverse, iluminar, emitir sonidos y hasta cantar. |
 |
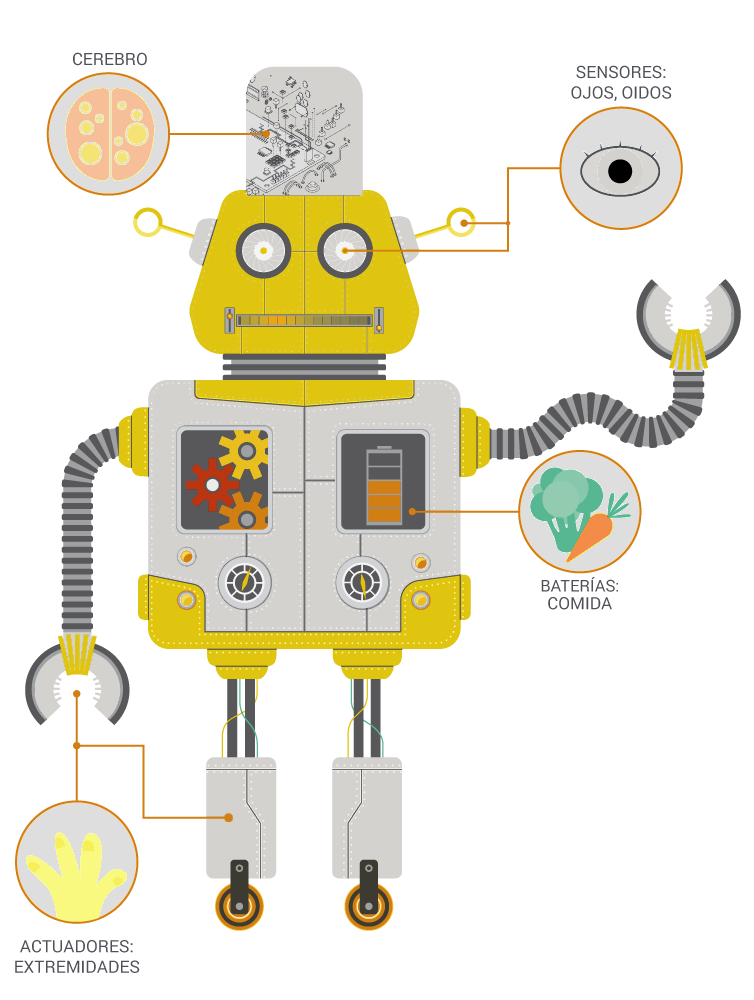
Si comparamos un robot con una persona, los sensores serían sus sentidos. Éstos transmiten información a su sistema de control o cerebro, modificando su comportamiento e influyendo sobre el mundo mediante sus actuadores. Además, un robot necesitará una fuente de energía para funcionar y una estructura física para sostener los elementos que lo componen.
El sistema de control: Qudino
El cerebro o Qudino es como un pequeño ordenador. Básicamente es un microcontrolador al que se le pueden conectar sensores (sentidos), y actuadores (músculos, voz, etc).
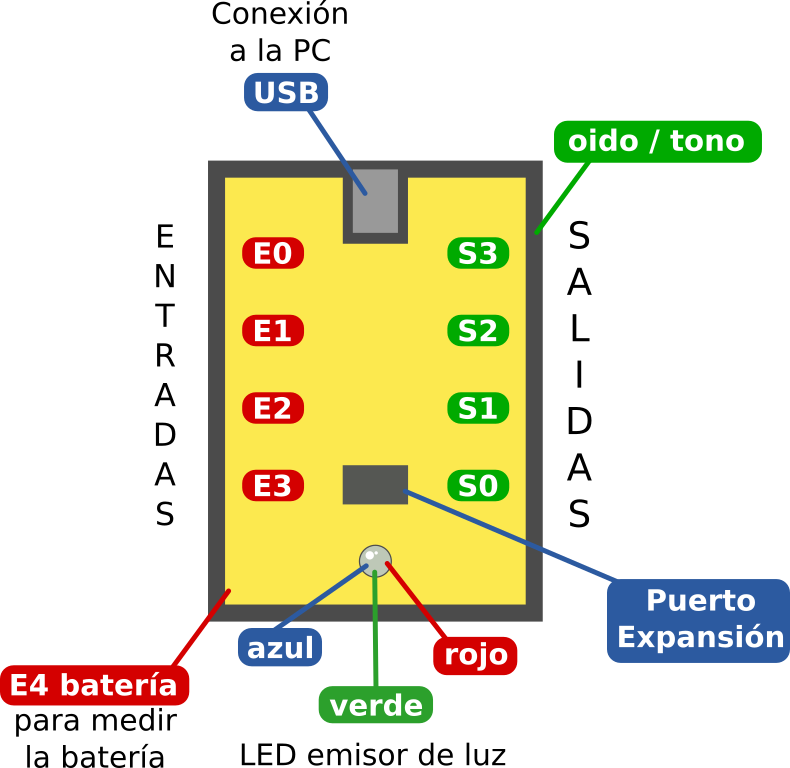
Qudino está formado por los siguientes componentes:
Un sensor es un componente electrónico que transmite más o menos electricidad en función de un elemento físico, como la luz, el sonido, la distancia, etc. Si queremos conectar un sensor a nuestra placa, tendremos que averiguar primero si el sensor es digital o analógico.
Un sensor digital solo puede tener dos valores: 1 o 0, todo o nada. Un ejemplo de sensor digital es un botón, en el que cuando pulsamos el botón éste vale 1, y cuando no lo pulsamos 0.
| Botón | 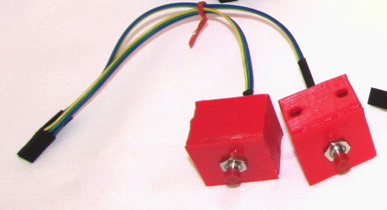 |
| Choque | 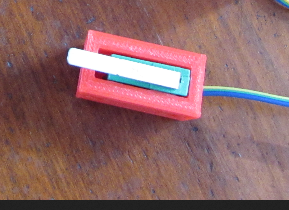 |
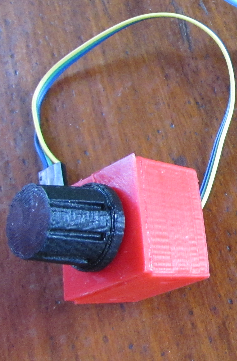
Un sensor analógico puede tener múltiples estados siendo capaz de transformar la cantidad de luz, temperatura u otros elementos físicos en un valor comprendido entre 0 y 5 volt. Un ejemplo de sensor analógico es un sensor de luz, donde dependiendo de la cantidad de luz que el sensor recibe dará un valor mayor o menor.
| Perilla
Ojos |
|
Un actuador es un componente electrónico capaz de realizar una acción sobre el entorno. Por ejemplo, un motor que mueve una rueda, un LED que indica que un aparato está encendido, un altavoz que emite un sonido, etc.
Utilizando Qudino, todos los actuadores que utilicemos se conectan a un pin salida. Hay actuadores digitales , como un LED, que sólo tienen dos estados, mientras que otros, como un servomotor, pueden tener múltiples posiciones y por tanto ser analógicos.
| Servo de posición | 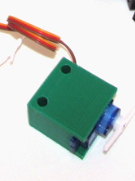 |
¿Cómo piensa una placa controladora?
A veces se crea un proyecto o un robot que no se comporta como uno había pensado. Recuerda que tu placa controladora es el cerebro de tu máquina, pero es mucho más limitado que un cerebro humano.
|
|
Algunos Vídeos

Qubótica participó de la exposición en el CCSM de FLISOL2018.
Muchas gracias a todos los que se acercaron, un gusto de participar un año más de FLISOL. 

Instalaremos el driver de la placa Arduino-Qudino:
Primero conectamos nuestro Qudino a la pc mediante el cable USB, por lo general automáticamente nos instalara el driver de la placa
Si no lo hace entonces realiza lo siguiente:
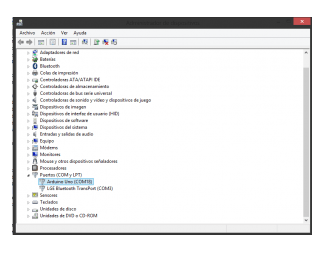
Para instalar el driver de la placa abrimos el Administrador de dispositivos y nos aparece en el listado Otros dispositivos Dispositivo → desconocido, hacemos click encima de el y en la pestaña “Controlador” pulsamos “Actualizar controlador” y después “Buscar software de controlador en el equipo”, especificamos la ruta de la carpeta drivers que se encuentra dentro de la carpeta de instalación de nuestro Qudino y automáticamente se instala el controlador.
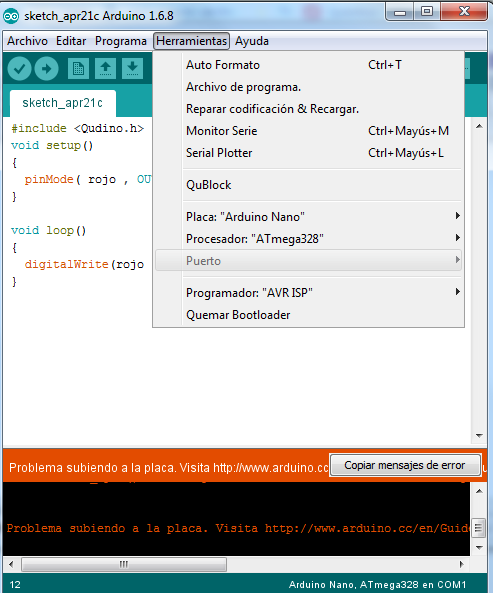
Abrimos el entorno de programación y en Herramientas Puerto Serial → seleccionamos el puerto COM# que nos aparece en el administrador de dispositivos cuando instalamos el driver y en Herramientas -> Dispositivos selecciona el tipo de placa que tienes.
Qudino interfaz
Ahora solo tienen que presionar el boton de enviar, si vez que parpadean los leds RX y TX en la placa al momento de cargar el programa y no te manda algun error el ide de Qudino hemos terminado de configurar tu entorno de desarrollo Qudino.
Hemos instalado y configurado correctamente nuestra placa Qudino y hemos visto el proceso necesario para cargar tus programas a Qudino. Mas adelante veremos algunos ejemplos de desarrollo en esta plataforma, explicaremos la estructura en hardware de la placa asi como el lenguaje de programacion Qudino.
Para utilizar Neopixel (led RGB programable),con Qudino ; se programa dentro de bucle o ciclo el siguiente Actuador.
![]()
Salidas S neo ó 10, 0,1,2,3. Número de led de led 0 a 255. Rojo ,verde y, azul desde 0 a 255, obteniendo así un gran número de tonalidades y colores.
Con Qudino se utiliza el siguiente programa:
![]()
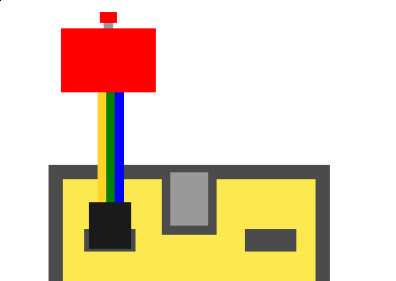
El kit básico permite el uso de neopixel exteriores. Los elementos necesarios aparecen en la siguiente fotografía, un Qudino, un Neopixel, una batería y cable de la misma,puede alimentarse por usb.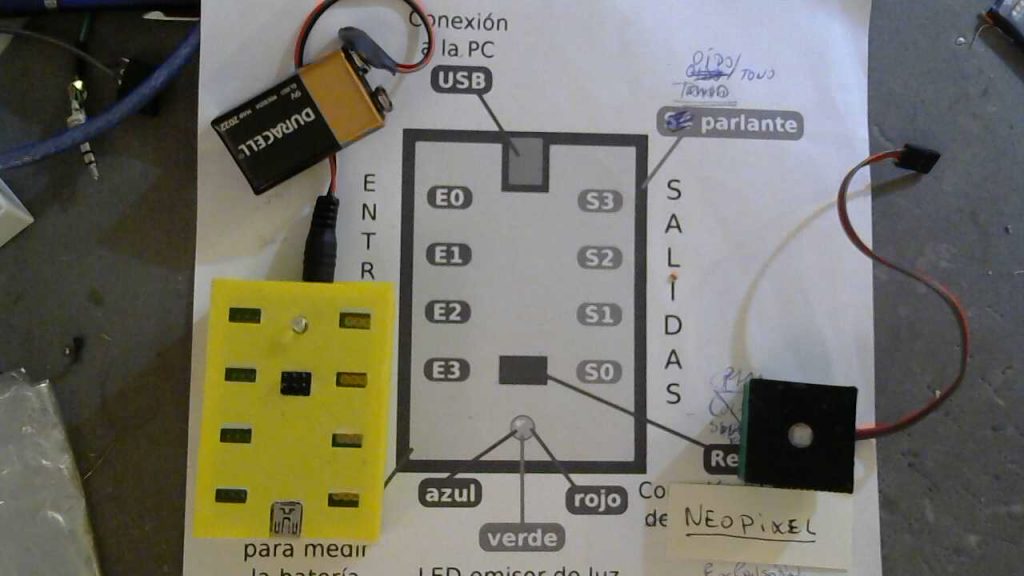
Este es el programa de ejemplo , se arma una secuencia de colores primarios R ; V ;y A con un retraso de 1 segundo entre cada uno y el siguiente. Led se pone 0 porque, se trabaja solo con un led

El video muestra el funcionamiento del programa.
También pueden conectarse tiras de 8 a más led con el programa 8 neo
![]()
y este arreglo de led Neo
![]()
Los vehículos de Braitenberg son pequeños robots que pueden exhibir comportamientos complejos con un armado muy simple. Los vehículos típicamente tienen cuerpos en forma de caja con una rueda a cada lado. En la parte delantera del vehículo tiene sensores que detectan diferentes tipos de estímulos (por ejemplo, luz) del entorno. Estos sensores están conectados directamente a las ruedas del vehículo de manera que las ruedas giran cuando el sensor se activa.
El concepto es sencillo, pero Braitenberg demostró que estos vehículos pueden exhibir comportamientos aparentemente complejos e interesantes como “amor” o “odio”.
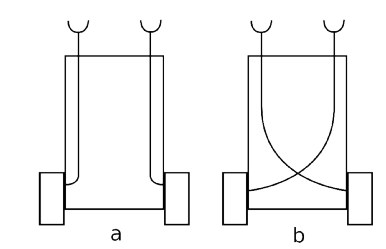
Modelos básico de vehículos de Braitenberg en el ejemplo esta implementado el «a»
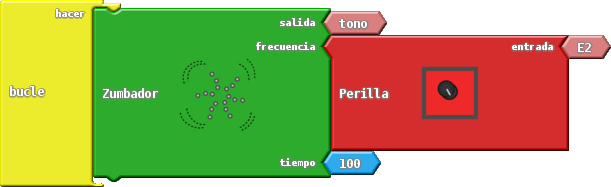
Para realizar este programa se conecta la perilla a una entrada del Qudino (E0, E1, E2, E3); el zumbador, esta incorporado en el módulo Qudino. La salida esta por defecto en tono,esto permite el uso del zumbador interno. La frecuencia esta por defecto en 440.

Perilla, nos permite modificar gradualmente el valor de una entrada.
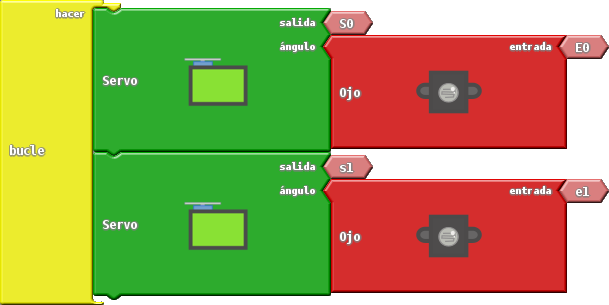
Programa del ejemplo:
Para generar el movimiento de las ruedas debemos conectar cada «rueda» a una salida por S0 y S1
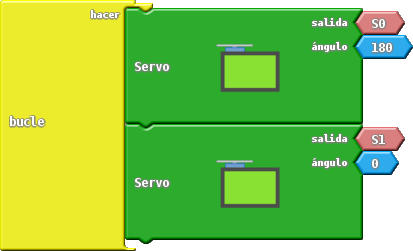
Si queremos generar un movimiento hacia la izquierda o hacia la derecha vamos a tener que poner los dos motores en 180° o los dos en 0°.
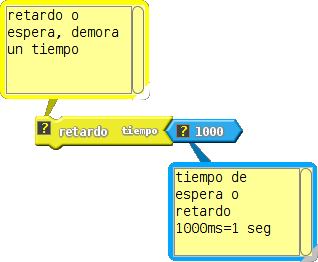
Agregando un retardo podemos hacer que un movimiento se hagan por un tiempo y luego agregar otro movimiento, otra retardo y otro movimiento…
En este ejemplo lo vemos moverse hacia adelante y luego hacia la derecha así sucesivas veces…
Construiremos un robot que huye de la oscuridad. Es decir, emularemos el comportamiento de algunos insectos que escapan cuando detectan una presencia que les obstruye la luz del sol, como señal de que un depredador se acerca.
¿Qué sensor utilizamos?
Ojo: detecta la luz ambiente.
¿Qué actuadores utilizamos?
Motores: son las que dan movimiento a las ruedas del robot.
Construimos el programa para el robot con Qublock
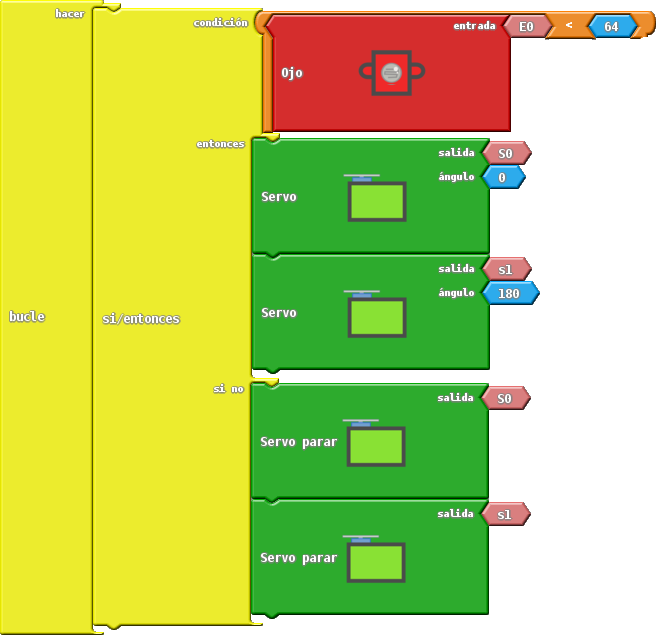
En el video podemos ver cómo huye el robot cuando la mano le tapa la luz.
Podemos también lograr el comportamiento inverso, es decir que el robot siga la oscuridad, solamente cambiando de posición los motores de la ruedas, invertimos las salidas que usamos en el caso anterior.
En el video podemos ver el resultado:
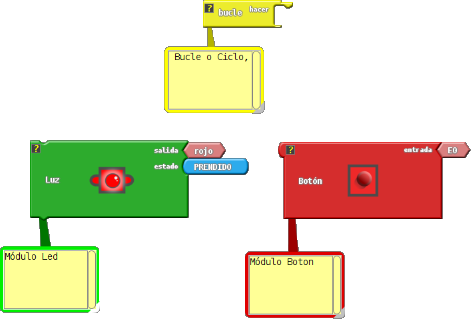
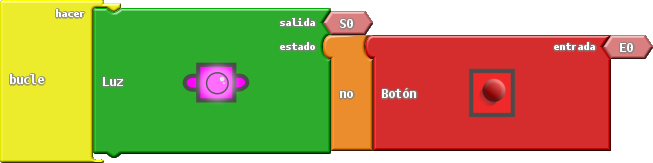
El objetivo de esta práctica es encender una Luz con un Botón, se utilizara: el led rojo, del LED (rojo, verde, azul) del Qudino.
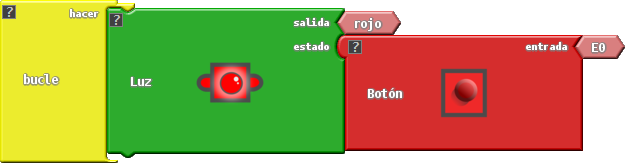
Por ejemplo así queda si lo unimos:
Y por ejemplo si queremos que funciona el revés:
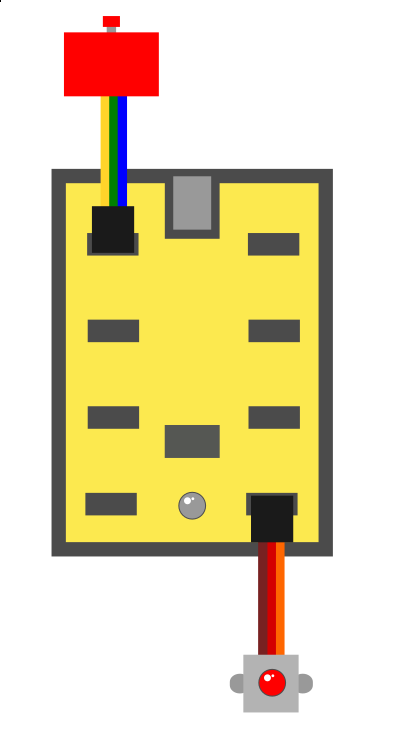
Ahora podemos probar con una led externa por ejemplo conectada en la salida S0.
¿Te atreves a hacer el programa?
