La Biblia del Qudino : Vehículos de Braitenberg con Qubotica

nuevo sitio: https://maquinaslibres.tk
Servo de Posición: El objetivo de esta práctica es controlar un servo de posición
El kit Básico posee un servo de posición, es decir, que puede girar media vuelta de 0 a 180°grados.
El Qudino puede hacerlo girar ángulos comprendidos entre 0 y180°, útil para realizar varios proyectos con mecanismos,por ejemplo: barreras, faros, grúas y otros.
El servo de posición es un actuador compuestos por un servo chico (Micro servo 9 g), que gira un ángulo de terminado por el programador comprendido entre, los valores 0 y 180 Grados.
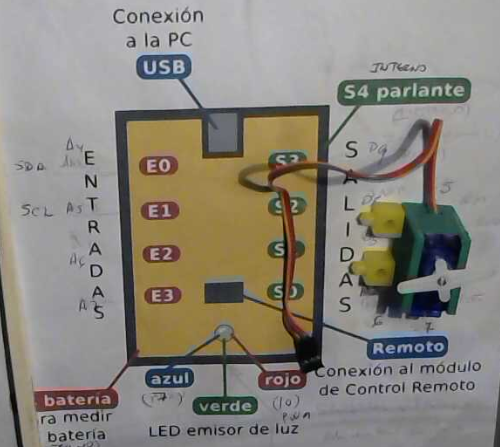
Se conectan en las salidas verdes (S0,S1,S2,S3). La conexión se realiza, con el color naranja, para el lado de afuera del Qudino.
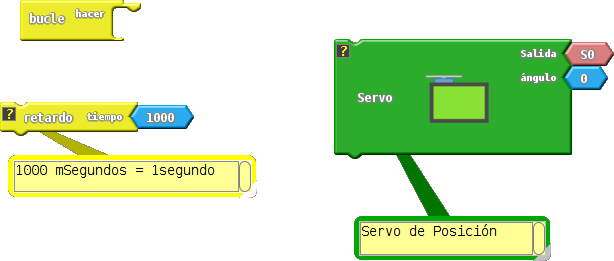
El módulo Servo tiene dos Propiedades Salida y Ángulo
Salida, se puede conectar el servo a las salidas S0, S1, S2, S3
Ángulo, el valor se puede fijar en valores entre 0-180°por ejemplo : 60,90 u otro.
También utilizamos retardo que hace que el programa se tome un tiempo,para luego continuar , el tiempo esta en mili segundos. (1000 = 1 segundo)


Tono y Perilla: En esta práctica utilizarán el módulo zumbador (tono) y el módulo la perilla (potenciómetro)
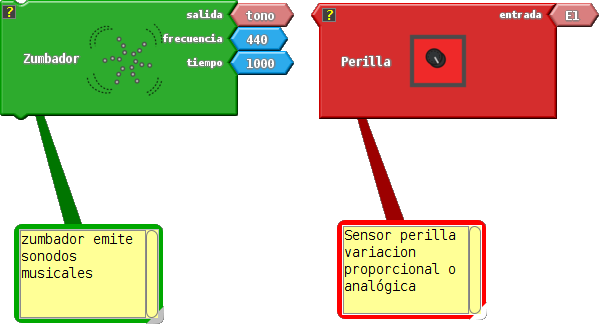
El módulo Zumbador (tono) tiene tres propiedades,salida , frecuencia y tiempo.
Salida tono, utiliza el zumbador interno de Qudino, se pueden agregar zumbadores adicionales en cualquier salida S(0,1,2,3)
Frecuencia: indica la frecuencia del tono musical,que se quiere reproducir
Tiempo: es la duración del tono musical, 1000msegundos =1Segundo.
El módulo Perilla (potenciómetro) tiene una propiedad entrada
El módulo Perilla se puede conectar a cualquier entrada E(0,1,2,3)
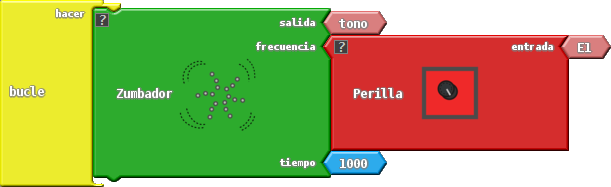
En este programa, por ejemplo,se cambio frecuencia por perilla , al variar la perilla manualmente se obtienen diferentes tonos musicales