
La palabra robot proviene del checo: robota, que significa trabajo duro o forzado. Se usó por primera vez durante la obra de teatro Rossum Universal Robots de Karel Čapek y su uso se extendió gracias a las obras de ciencia ficción creadas por el escritor Isaac Asimov , en cuyos libros aparece por primera vez el termino robótica, como la ciencia de construir robots.
A menudo nos imaginamos a un robot como una máquina con forma humana que camina, habla, gesticula… pero en realidad es algo mucho más sencillo:
“Un robot es una máquina automática programable que es capaz de interpretar información del medio físico para modificar su conducta. Tiene la capacidad de interactuar con el entorno y, en función de ello, realizar unas funciones u otras.
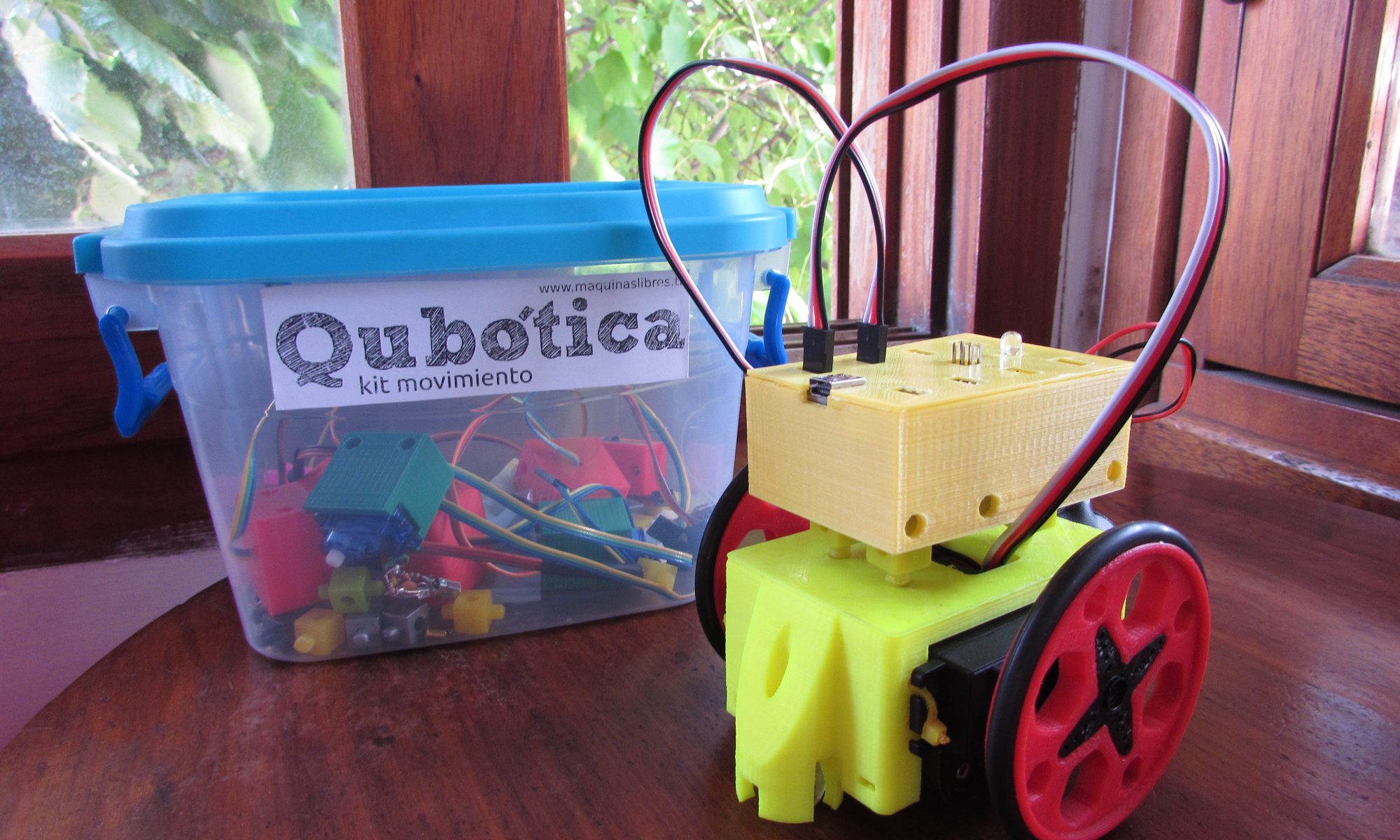
| Qudino es el cerebro que interpreta al mundo por medio de sus sensores y acciona mediante sus actuadores.
Sensores: estos son los sentidos de nuestro robot con los que podrá ver, oir y tocar. Actuadores: son las acciones, que puede realizar nuestro robot; moverse, iluminar, emitir sonidos y hasta cantar. |
 |
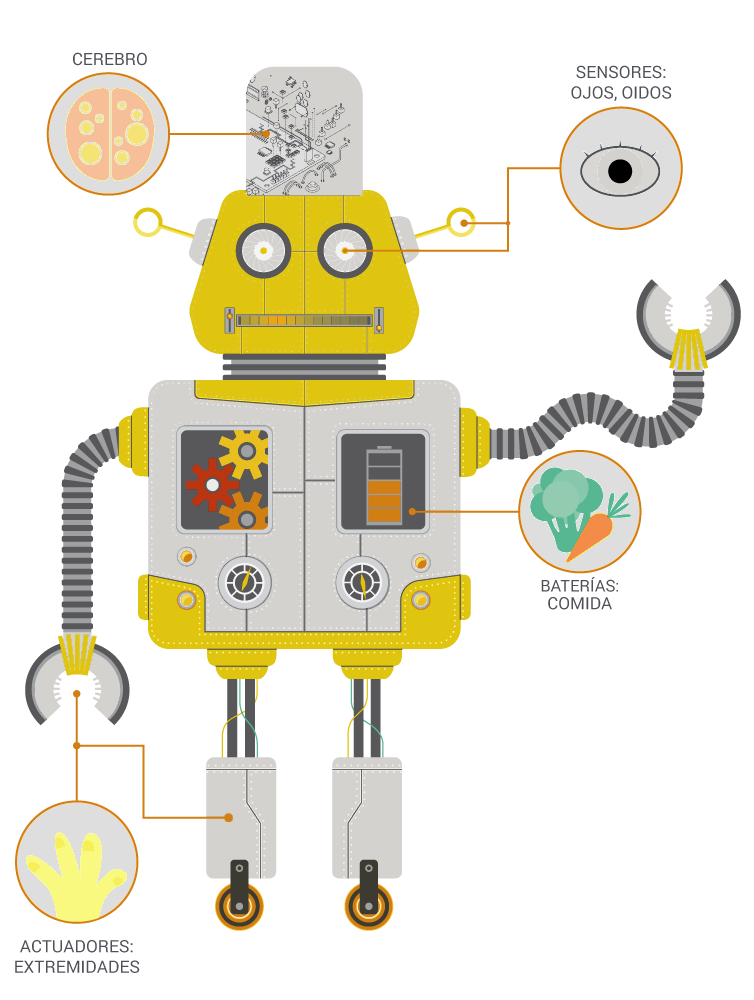
Si comparamos un robot con una persona, los sensores serían sus sentidos. Éstos transmiten información a su sistema de control o cerebro, modificando su comportamiento e influyendo sobre el mundo mediante sus actuadores. Además, un robot necesitará una fuente de energía para funcionar y una estructura física para sostener los elementos que lo componen.
El sistema de control: Qudino
El cerebro o Qudino es como un pequeño ordenador. Básicamente es un microcontrolador al que se le pueden conectar sensores (sentidos), y actuadores (músculos, voz, etc).
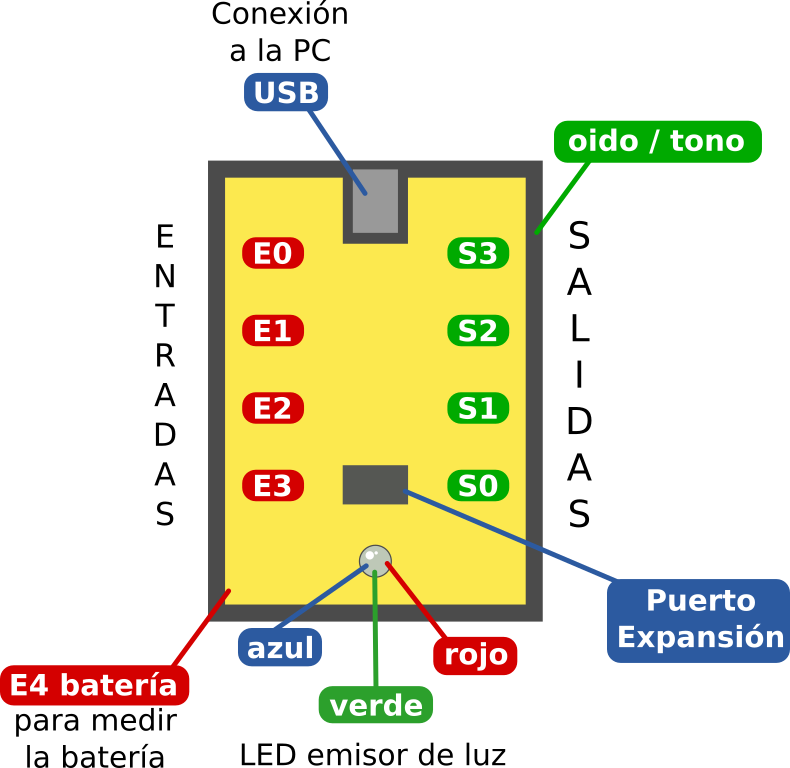
Qudino está formado por los siguientes componentes:
- Pines de Entrada : se conectan Sensores
- Pines de Salida: controlan a los Actuadores
- Entrada micro-USB: a través de esta entrada la placa se comunica con el ordenador.
- Entrada de baterías: la placa recibe energía de las baterías o la fuente de alimentación para poder funcionar.
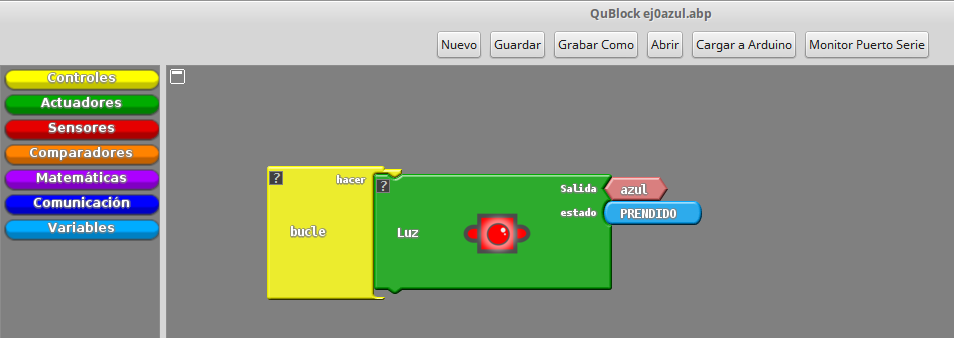
- Led RGB: emite luz roja,verde, azul
- Zumbador: emite y capta sonido
Los sensores
Un sensor es un componente electrónico que transmite más o menos electricidad en función de un elemento físico, como la luz, el sonido, la distancia, etc. Si queremos conectar un sensor a nuestra placa, tendremos que averiguar primero si el sensor es digital o analógico.
El sensor digital
Un sensor digital solo puede tener dos valores: 1 o 0, todo o nada. Un ejemplo de sensor digital es un botón, en el que cuando pulsamos el botón éste vale 1, y cuando no lo pulsamos 0.
| Botón | 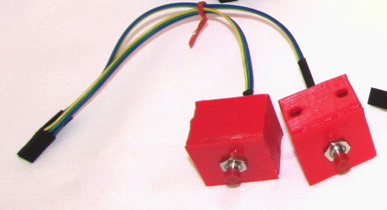 |
| Choque | 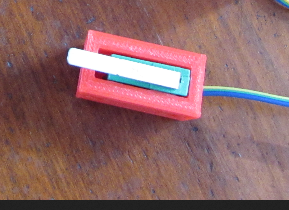 |
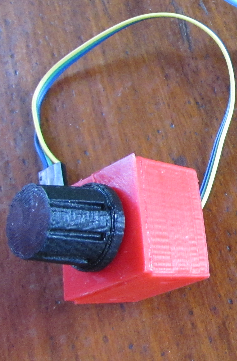
El sensor analógico
Un sensor analógico puede tener múltiples estados siendo capaz de transformar la cantidad de luz, temperatura u otros elementos físicos en un valor comprendido entre 0 y 5 volt. Un ejemplo de sensor analógico es un sensor de luz, donde dependiendo de la cantidad de luz que el sensor recibe dará un valor mayor o menor.
| Perilla
Ojos |
|

Los actuadores
Un actuador es un componente electrónico capaz de realizar una acción sobre el entorno. Por ejemplo, un motor que mueve una rueda, un LED que indica que un aparato está encendido, un altavoz que emite un sonido, etc.
Utilizando Qudino, todos los actuadores que utilicemos se conectan a un pin salida. Hay actuadores digitales , como un LED, que sólo tienen dos estados, mientras que otros, como un servomotor, pueden tener múltiples posiciones y por tanto ser analógicos.
| Servo de posición |  |
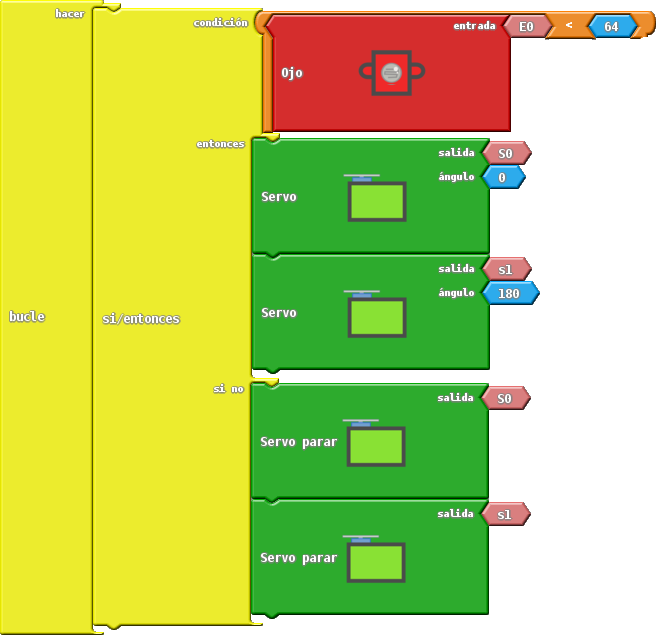
¿Cómo piensa una placa controladora?
A veces se crea un proyecto o un robot que no se comporta como uno había pensado. Recuerda que tu placa controladora es el cerebro de tu máquina, pero es mucho más limitado que un cerebro humano.
|
|
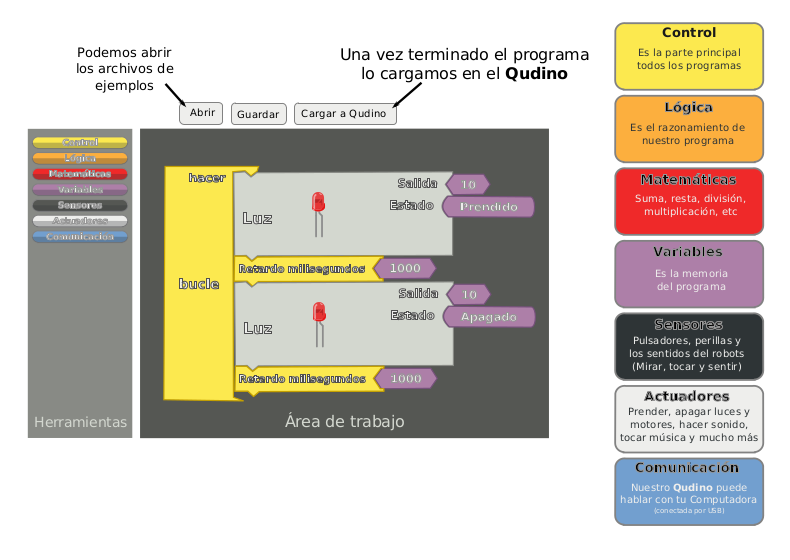
Algunos Vídeos